Yes you can adjust every level with new bafang besst pro.Yes technically the M510 is as powerful as the Bosch!
No and no!
See here Bafang m510 - EMTB Forums
Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.

Yes you can adjust every level with new bafang besst pro.Yes technically the M510 is as powerful as the Bosch!
No and no!
Guys, could you write Bafang and ask them for M600 (and M500) firmware with a possibility to adjust settings like inM510?
M600 is still on the market for 2023 and probably for future, and have good market share in US so it may be very helpful if Bafang prepare such firmware for this motor also.
I may have phrased my question not clear enough, I didn't mean if any of the M5x0/600 motors can compete with the established brands in terms of raw power/torque, I am interested in having a good adaptive mode that is on par with the "Trail" mode of Shimano, or the "MTB" mode of Bosch.The M600 has fantastic power, but Bafang firmware is poor and implementation even worse. I’ll forgive it because of the power and be mindful of its aggressive start power, especially when manoeuvring.
Not interested in messing with firmwares so that rules out the m510
Which firmware are they running then?!Even their own Bafang Enduro MTB team do not run Bafang firmware ...
Which firmware are they running then?!
I mean, they can't be running a Bosch motor without anyone noticing it, do they have a custom firmware that noone else has acess too? I would like to think Bafang would implement a good trail mode if they had anyone actually coding it.
With the current state, I don't know if I can justify the purchase of any of these Bafang motors, I don't need/want power, I want a smooth and adaptive trail mode (preferably one where I downregulate the power, preferably via an app - not the other way around).
As far i know the 46.7 is used as a stock, and thats pretty good firmware imo.Good idea. I just did that per your request.
On a different note - Does anyone know what version of the firmware is shipping on the M600 currently (or recently)?
As far i know the 46.7 is used as a stock, and thats pretty good firmware imo.
Thats limited to 15A amps and is weaker.20.8 if your ride is 100% offroad.
I‘m running 46.7 on 52V and ride a lot of technical steep single track. I‘ve got used to the ramp up and I’ve got to say that the bike handles as good as my Bosch and Brose motored friends in the same tracks. In some ways you can use that punchiness to get up steps and such like that they seem to have no chance of getting up. Technically at 52V it should be worse but the biggest gain in taming a very peaky motor has been both going to 52V and the use of 155mm cranks, the two changes have made a good motor even better.Yes on a non technical steep hill it is great, but if you are riding rooted, rutted and technical steep short singletrack rails, its very annoying. Its a compromise on long steep hills, i switch to 5 PAS levels rather 9 PAS levels. This helps on the long steep hills although the ramp up on PAS 2 is still too aggressive.
Actually the company FLX just released a EmTB with what they call the Bafang M610 uses 750watrs continuous and 1000watt peak. Plus their newest release is supsr cheap for the parts.I was primarily talking about the M510, no doubt there's an M610 on the way.
Rapid obsolescence is one of the risks when buying a non-mainstream solution, particularly of Chinese origin and particularly in a field that is undergoing a huge upsurge in both popularity and progress. It's unfortunate that a more open source ethos doesn't tend to come with such products, but great that such things also tend to attract people with a more techy mindset, who are happy to tear them to pieces in the pursuit of making them better,or in my case, breaking them...!
Well our torque sensor went within the first 150miles after we rebuilt the m600 and replaced the bad torque sensor. Not a single problem. Only issue is the manual wheelies. Coming from dirtbike world, its hard to get my Luna X2 up on the rear wheel. Tbh if i could do it all over, i'd buy a bike with ultra bagang motor, or id go with Bosch abs driven bike like the Whyte 180RS.This question is for m600 riders with a lot of miles on that motor.
How reliable is it in practice? For the sake of the question set aside any water intrusion issues. I can solve for those.
I'd like to know in a general sense if the m600 generally works as advertised or if around some milage point they tend to have internal failures.
Any insight would be helpful. Im trying to justify a cheeb build with an m600.
Thanks in advance
bad torque sensor cause no assist from motor when pedalling?Well our torque sensor went within the first 150miles after we rebuilt the m600 and replaced the bad torque sensor. Not a single problem. Only issue is the manual wheelies. Coming from dirtbike world, its hard to get my Luna X2 up on the rear wheel. Tbh if i could do it all over, i'd buy a bike with ultra bagang motor, or id go with Bosch abs driven bike like the Whyte 180RS.
Much more reliable andna difference in how the power is transferred to the ground. Bosch is better, but just a little under powered for that top end.
This is very interesting! Still no information on bafang m610 on the official website. This would however be s very desirable upgrade..Actually the company FLX just released a EmTB with what they call the Bafang M610 uses 750watrs continuous and 1000watt peak. Plus their newest release is supsr cheap for the parts.

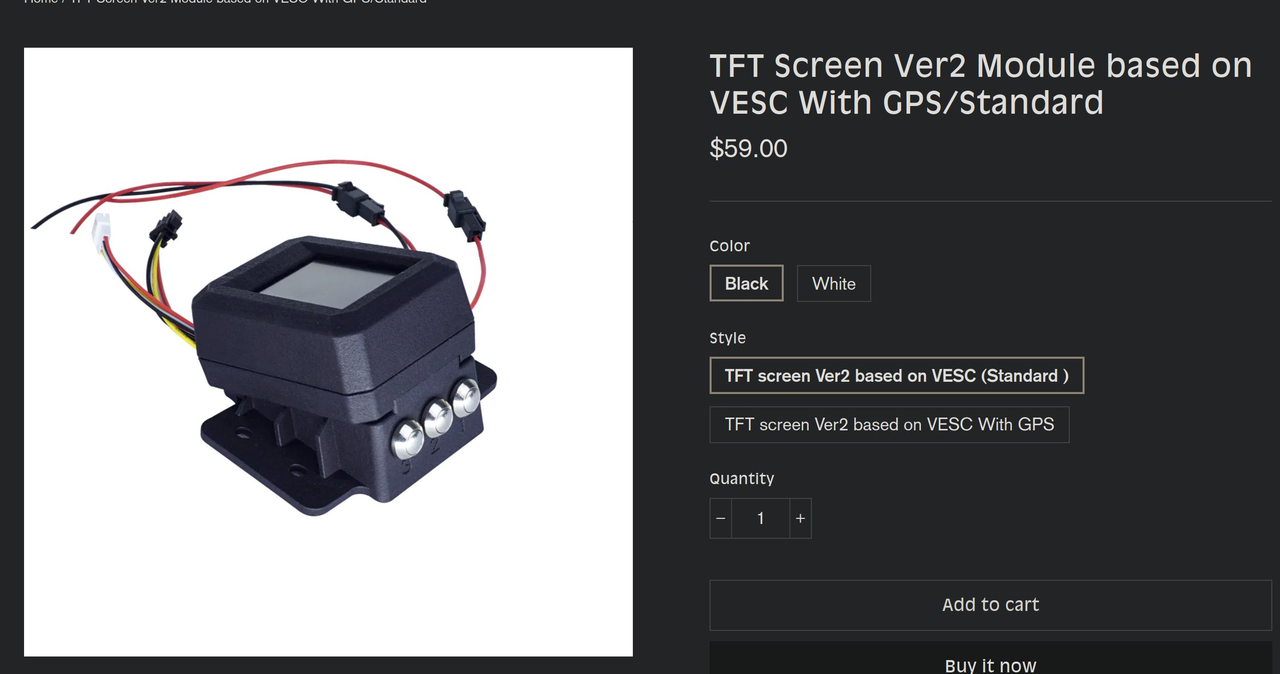

Hi,I have this one:
So far, so good, 1.1kW in peak. You only need to swap two wires on connector or make an adapter with plugs.
Bafang M600 Motor Controller - Version 3.2
Compatible with these FLX Electric bikes and Electric Mountain bikes: Roadster (SE) Step-Through (1.0 & 2.0) Trail (F4, F5, & SE)flx.bike
You may also add one shunt resitor then force M600 18A firmware upload - it also should work.
 www.greenbikekit.com
www.greenbikekit.com
you may try myus.com, i used their services once, however i see Czechia on FLX list.Hi,
Do you know where FLX.bike sends its goods?
I wanted to order this controller, but it can't be sent to the Czech Republic...
I would have it forwarded from one of the countries that FLX ships to...
 github.com
github.com
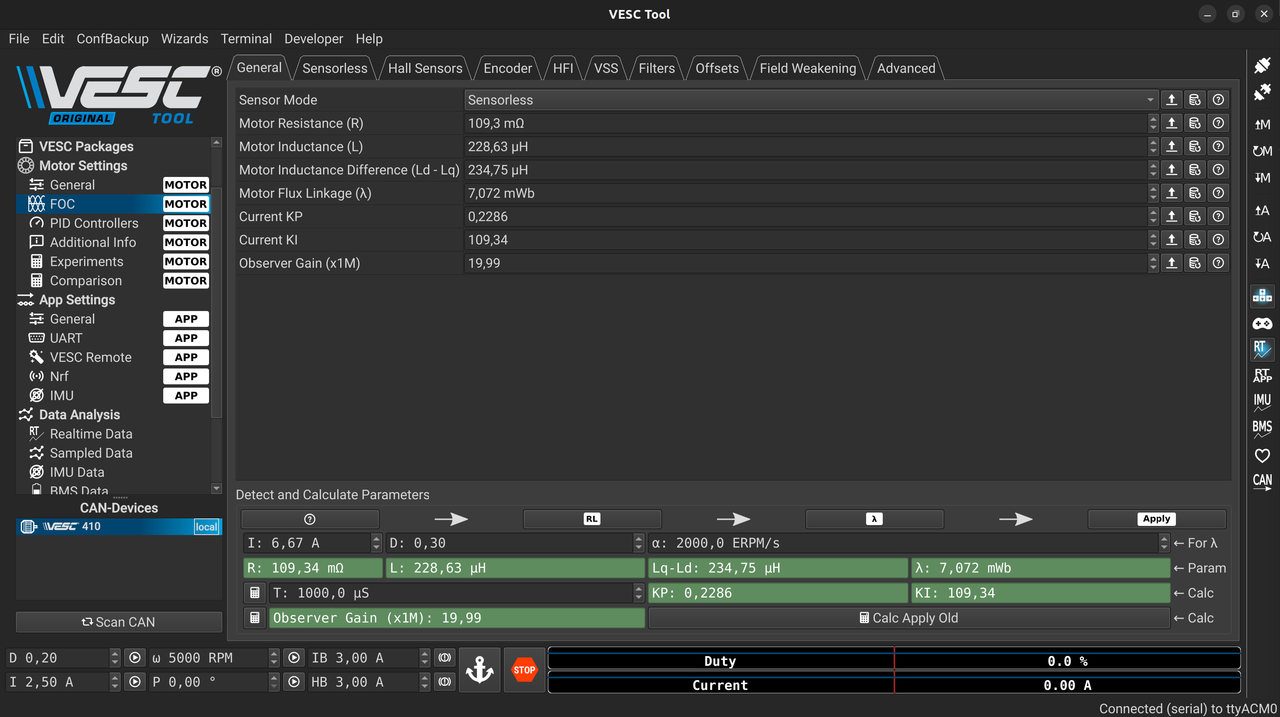
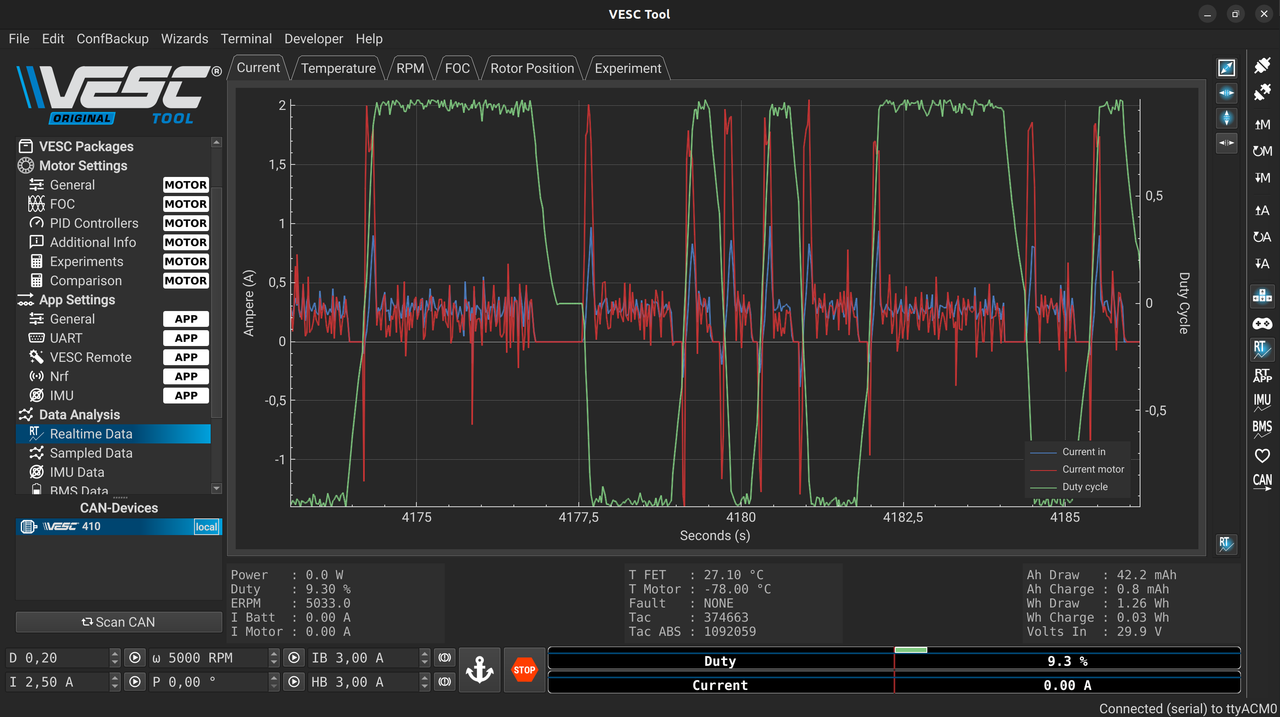
Almost for sure original firmware on the original motor controller, implements FOC.This is difficult to grasp but very interesting!I take my hat off before you. Also do you know if stock controller uses FOC? If not there might be some efficiency gain as well!
I understand your suggestion, but I bought my M500 only 8 months ago and If I would need to buy M510, I would need to pay 1000€!! Paying 1000€ just to have the assist levels factor customized??I would say this issue was resolved in m510 that allows you with the help of Besst Pro to regulate max current on each assist level. If you set it to 10-15% you get a very gentle assist